项目介绍 本项目要求使用松灵小车上录制的bag包数据,编写软件,用命令行窗口显示小车的IMU和里程计(odometry)数据;用图形界面显示颜色相机和深度相机的数据(、用OpenCV库);用图形界面显示激光雷达的点云数据(利用PCL库);
项目实现 前言 在本项目的完成过程中使用了带有ROS的Ubuntu 20.04的docker镜像,名为tiryoh/ros-desktop-vnc:melodic.dockerhub地址 。在该镜像中已经安装了OpenCV、PCL库。项目源码仓库 项目视频地址
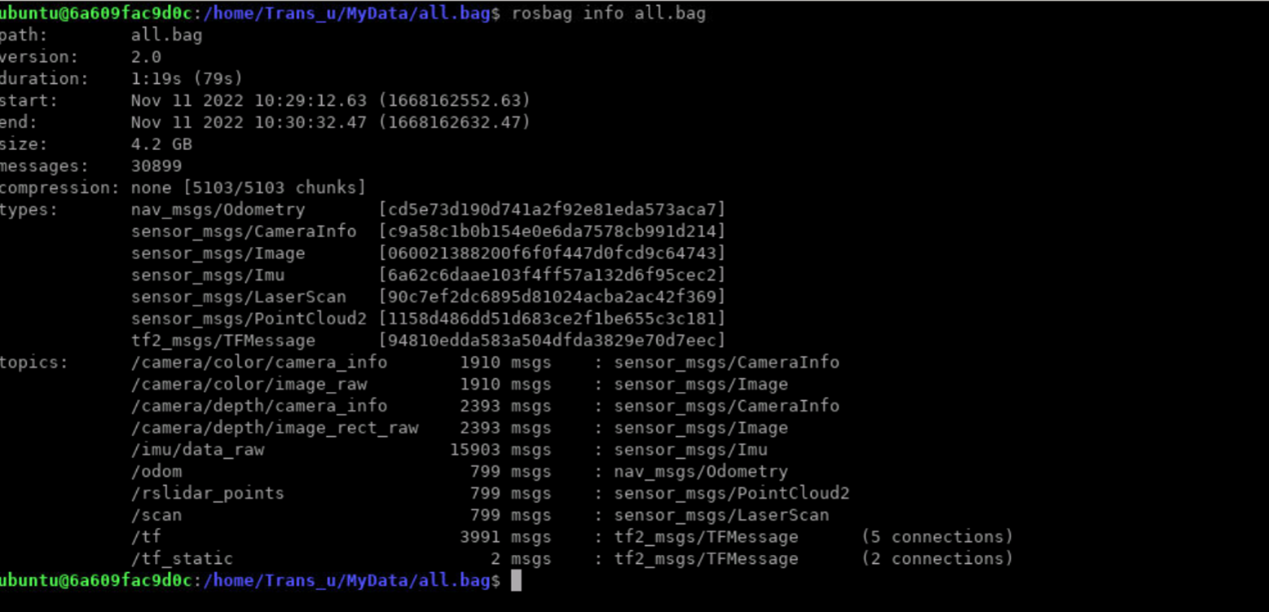
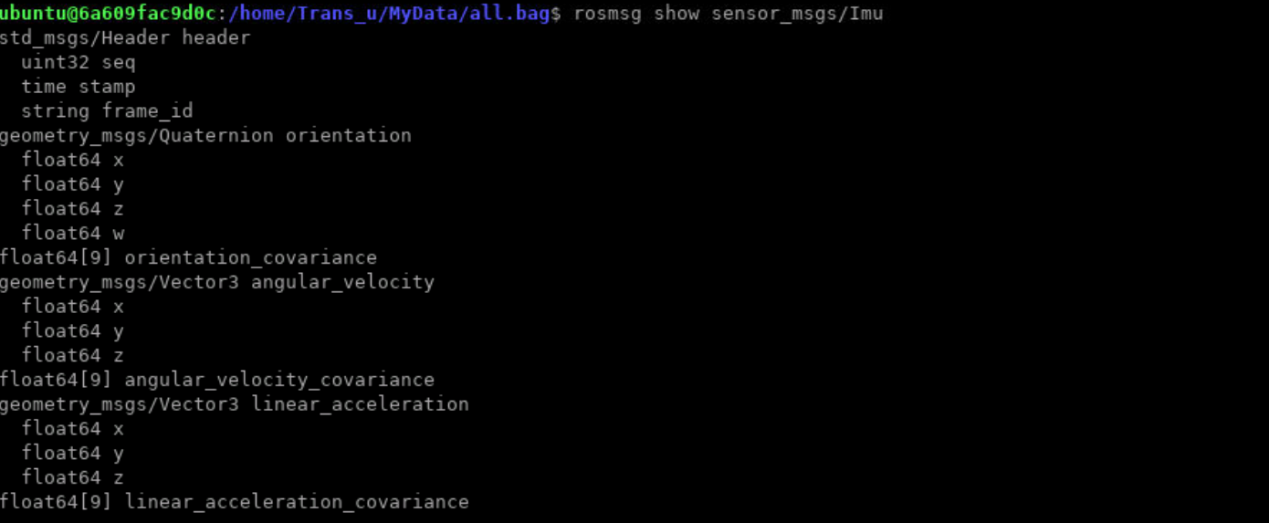
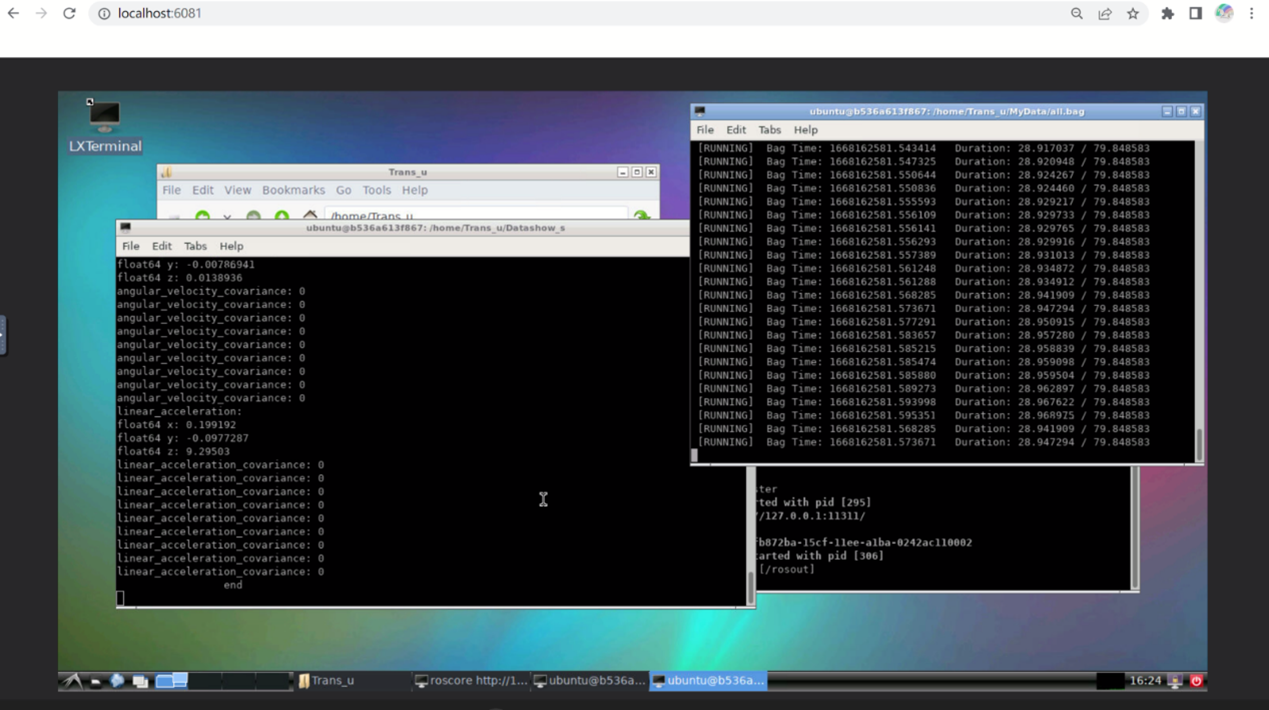
IMU、里程计数据显示 根据数据包内容,数据包重现时,通过/imu/data_raw话题发布sensor_msgs/Imu类型的imu数据,通过/odom话题发布nav_msgs/Odometry类型的里程计数据。只需订阅相关话题接收相关信息,调用数据显示回调函数即可实现功能。在编写的节点程序中,关键步骤在编写输出数据的订阅者回调函数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 void callbacki (const sensor_msgs::Imu::ConstPtr &a) std::cout<<"std_msgs/Header header" <<std::endl; std::cout<<"uint32 seq: " <<a->header.seq<<std::endl; std::cout<<"time stamp: " <<a->header.stamp<<std::endl; std::cout<<"frame_id: " <<a->header.frame_id<<std::endl; std::cout<<"orientation: " <<std::endl; std::cout<<"float64 x: " <<a->orientation.x<<std::endl; std::cout<<"float64 y: " <<a->orientation.y<<std::endl; std::cout<<"float64 z: " <<a->orientation.z<<std::endl; std::cout<<"float64 w: " <<a->orientation.w<<std::endl; for (int i=0 ;i<9 ;i++){ std::cout<<"orientation_covariance: " <<a->orientation_covariance[i]<<std::endl; } std::cout<<"angular_velocity: " <<std::endl; std::cout<<"float64 x: " <<a->angular_velocity.x<<std::endl; std::cout<<"float64 y: " <<a->angular_velocity.y<<std::endl; std::cout<<"float64 z: " <<a->angular_velocity.z<<std::endl; for (int i=0 ;i<9 ;i++){ std::cout<<"angular_velocity_covariance: " <<a->angular_velocity_covariance[i]<<std::endl; } std::cout<<"linear_acceleration: " <<std::endl; std::cout<<"float64 x: " <<a->linear_acceleration.x<<std::endl; std::cout<<"float64 y: " <<a->linear_acceleration.y<<std::endl; std::cout<<"float64 z: " <<a->linear_acceleration.z<<std::endl; for (int i=0 ;i<9 ;i++){ std::cout<<"linear_acceleration_covariance: " <<a->linear_acceleration_covariance[i]<<std::endl; } std::cout<<" end " <<std::endl; return ; }
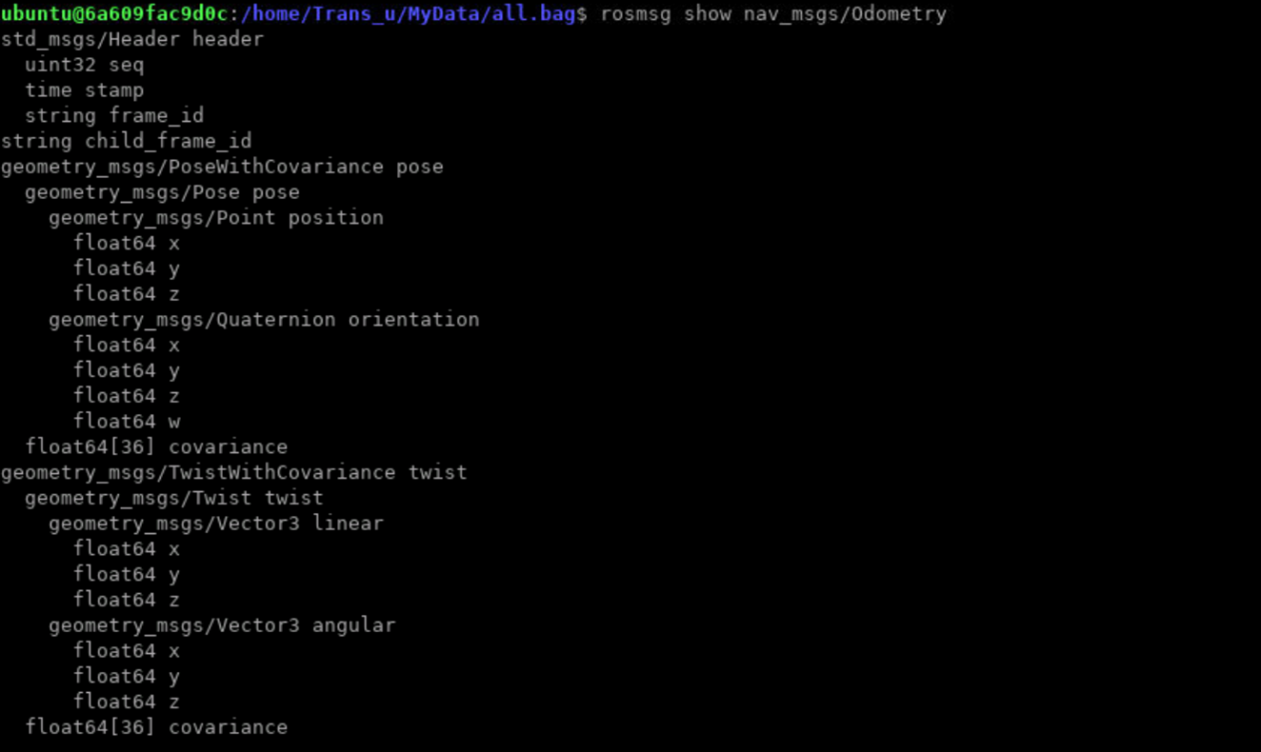
里程计数据显示回调函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 void callbacki (const nav_msgs::Odometry::ConstPtr& a) std::cout << "std_msgs/Header header" << std::endl; std::cout << "uint32 seq: " << a->header.seq << std::endl; std::cout << "time stamp: " << a->header.stamp << std::endl; std::cout << "frame_id: " << a->header.frame_id << std::endl; std::cout << "child_frame_id: " << a->child_frame_id << std::endl; std::cout << "geometry_msgs/PoseWithCovariance pose" << std::endl; std::cout << "geometry_msgs/Pose pose" << std::endl; std::cout << "geometry_msgs/Point position" << std::endl; std::cout << "float64 x: " << a->pose.pose.position.x << std::endl; std::cout << "float64 y: " << a->pose.pose.position.y << std::endl; std::cout << "float64 z: " << a->pose.pose.position.z << std::endl; std::cout << "geometry_msgs/Quaternion orientation" << std::endl; std::cout << "float64 x: " << a->pose.pose.orientation.x << std::endl; std::cout << "float64 y: " << a->pose.pose.orientation.y << std::endl; std::cout << "float64 z: " << a->pose.pose.orientation.z << std::endl; std::cout << "float64 w: " << a->pose.pose.orientation.w << std::endl; std::cout << "covariance: " << std::endl; for (int i = 0 ; i < 36 ; ++i) { std::cout << a->pose.covariance[i] << " " ; } std::cout<<std::endl; std::cout << "geometry_msgs/TwistWithCovariance twist" << std::endl; std::cout << "geometry_msgs/Twist twist" << std::endl; std::cout << "geometry_msgs/Vector3 linear" << std::endl; std::cout << "float64 x: " << a->twist.twist.linear.x << std::endl; std::cout << "float64 y: " << a->twist.twist.linear.y << std::endl; std::cout << "float64 z: " << a->twist.twist.linear.z << std::endl; std::cout << "geometry_msgs/Vector3 angular" << std::endl; std::cout << "float64 x: " << a->twist.twist.angular.x << std::endl; std::cout << "float64 y: " << a->twist.twist.angular.y << std::endl; std::cout << "float64 z: " << a->twist.twist.angular.z << std::endl; std::cout << "covariance: " << std::endl; for (int i = 0 ; i < 36 ; ++i) { std::cout << a->twist.covariance[i] << " " ; } std::cout<<std::endl; std::cout << " end " << std::endl; return ; }
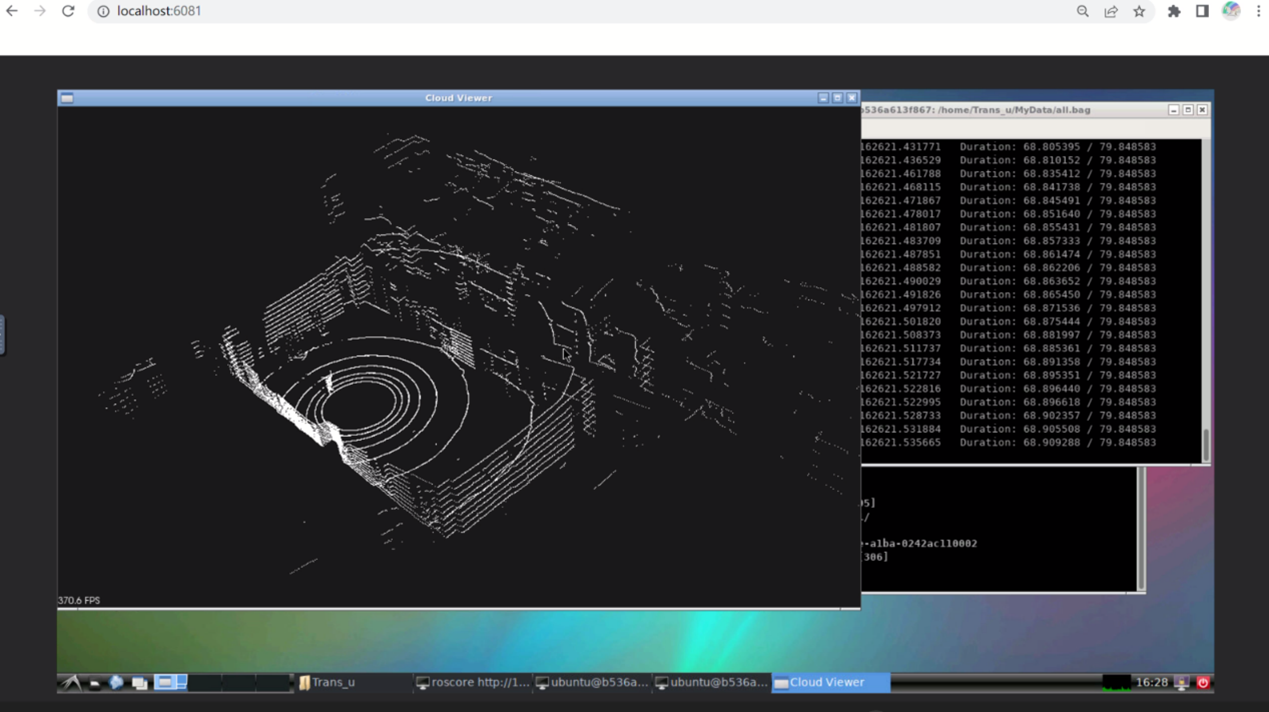
点云数据显示 由数据包内容可知,数据包通过/rslidar_points话题发布sensor_msgs/PointCloud2类型的点云数据消息,在节点代码中,订阅/rslidar_points话题,使用PCL库,将将接收到的sensor_msgs::PointCloud2类型的消息转换为PCL库中的pcl::PCLPointCloud2类型。然后,使用pcl::fromPCLPointCloud2函数将pcl::PCLPointCloud2类型转换为pcl::PointCloudpcl::PointXYZ类型的点云数据。创建一个CloudViewer对象,利用该对象显示点云数据,即可实现功能。
1 2 3 4 5 6 7 8 9 10 void callbacki (const sensor_msgs::PointCloud2::ConstPtr &a) pcl::PointCloud<pcl::PointXYZ> cloud; pcl::PCLPointCloud2 pcl_pc; pcl_conversions::toPCL (*a, pcl_pc); pcl::fromPCLPointCloud2 (pcl_pc, cloud); viewer.showCloud (cloud.makeShared ()); return ; }
编写如上函数在订阅/rslidar_points话题时调用即可实现功能。
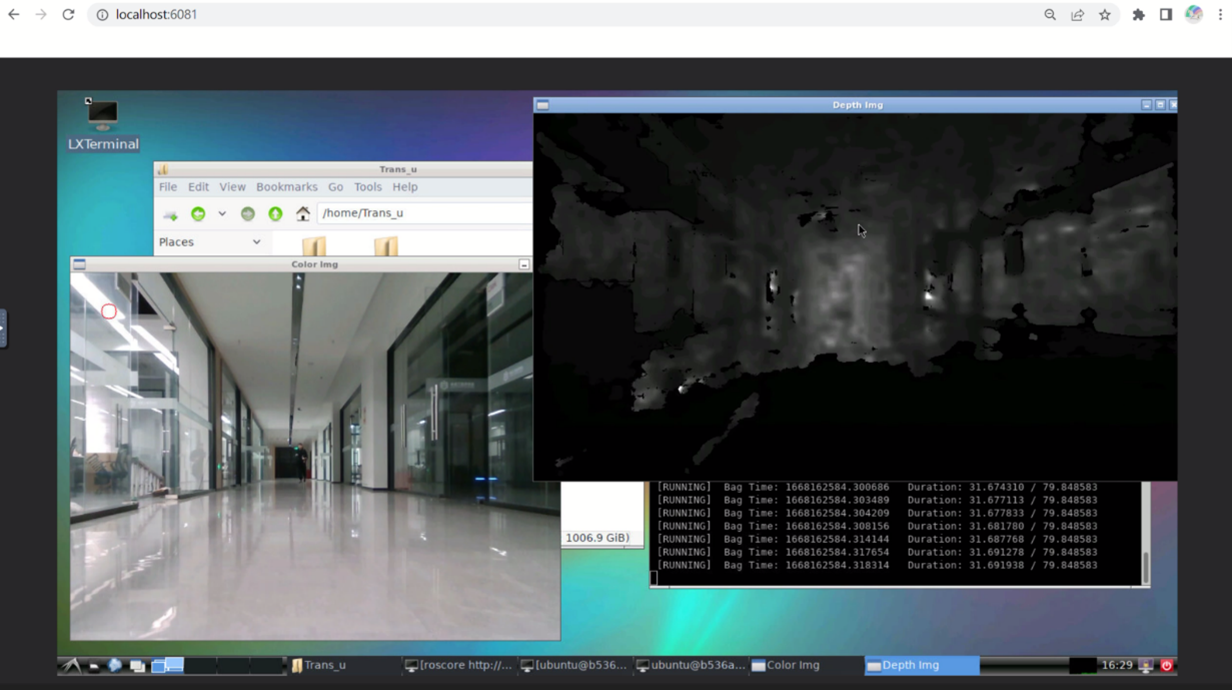
深度相机与颜色相机数据显示 由数据包内容知,数据包重现时通过/camera/color/image_raw与/camera/depth/image_rect_raw话题发布颜色相机与深度相机数据信息消息。
定义如下ImageConverter类:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 class ImageConverter { ros::NodeHandle nh_; image_transport::ImageTransport it_; image_transport::Subscriber image_sub_color; image_transport::Subscriber image_sub_depth; image_transport::Publisher image_pub_color; image_transport::Publisher image_pub_depth; public : ImageConverter () : it_ (nh_) { image_sub_color = it_.subscribe ("/camera/color/image_raw" , 1 , &ImageConverter::imageCb, this ); image_sub_depth = it_.subscribe ("/camera/depth/image_rect_raw" , 1 , &ImageConverter::depthCb, this ); image_pub_color = it_.advertise ("/image_converter/output_video/color" , 1 ); image_pub_depth = it_.advertise ("/image_converter/output_video/depth" , 1 ); cv::namedWindow (OPENCV_WINDOW_COLOR); cv::namedWindow (OPENCV_WINDOW_DEPTH); } ~ImageConverter () { cv::destroyWindow (OPENCV_WINDOW_COLOR); cv::destroyWindow (OPENCV_WINDOW_DEPTH); } void imageCb (const sensor_msgs::ImageConstPtr &msg) { cv_bridge::CvImagePtr cv_ptr; try { cv_ptr = cv_bridge::toCvCopy (msg, sensor_msgs::image_encodings::BGR8); } catch (cv_bridge::Exception &eee) { ROS_ERROR ("cv_bridge exception: %s" , eee.what ()); return ; } if (cv_ptr->image.rows > 60 && cv_ptr->image.cols > 60 ) { cv::circle (cv_ptr->image, cv::Point (50 , 50 ), 10 , CV_RGB (255 , 0 , 0 )); } cv::imshow (OPENCV_WINDOW_COLOR, cv_ptr->image); cv::waitKey (3 ); image_pub_color.publish (cv_ptr->toImageMsg ()); } void depthCb (const sensor_msgs::ImageConstPtr &msg) { cv_bridge::CvImagePtr cv_ptr; try { cv_ptr = cv_bridge::toCvCopy (msg, sensor_msgs::image_encodings::TYPE_16UC1); } catch (cv_bridge::Exception &e) { ROS_ERROR ("cv_bridge exception: %s" , e.what ()); return ; } if (cv_ptr->image.rows > 60 && cv_ptr->image.cols > 60 ) cv::circle (cv_ptr->image, cv::Point (50 , 50 ), 10 , CV_RGB (255 , 0 , 0 )); cv::imshow (OPENCV_WINDOW_DEPTH, cv_ptr->image); cv::waitKey (3 ); image_pub_depth.publish (cv_ptr->toImageMsg ()); } };
在主函数中创建该类的一个对象即可实现功能。该类包括一个ROS节点句柄对象、一个图像数据传输对象、四个图像传输相关的成员变量。利用构造函数初始化ROS节点句柄对象与图像传输对象,创建四个图像传输相关的订阅者和发布者。当接受到彩色图像数据时调用imageCb函数处理接收到的消息,将ROS消息转换为OpenCV的CvImagePtr类型,后将图像显示在OpenCV窗口中,并发布处理后的彩色图像消息。当接受到深度图像数据时调用depthCb函数处理接收到的消息,同样的将ROS消息转换为OpenCV的CvImagePtr类型,将图像显示在OpenCV窗口中,发布处理后的彩色图像消息。
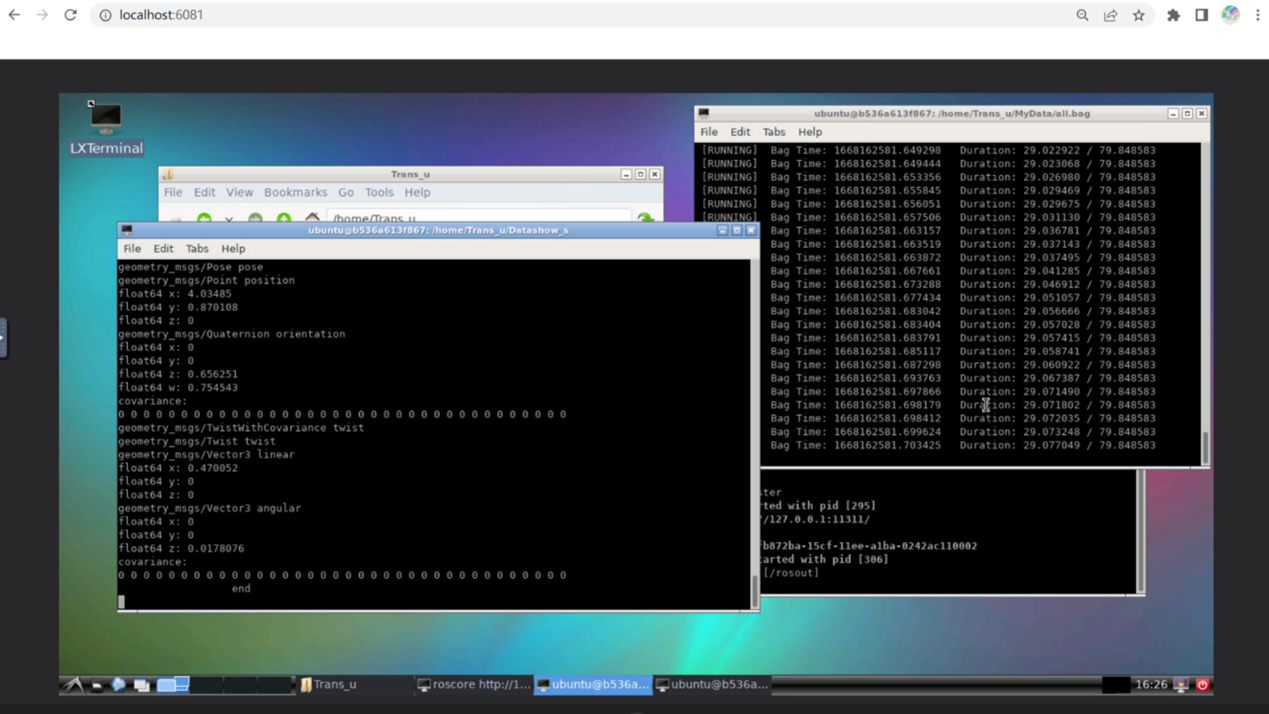
实现效果:
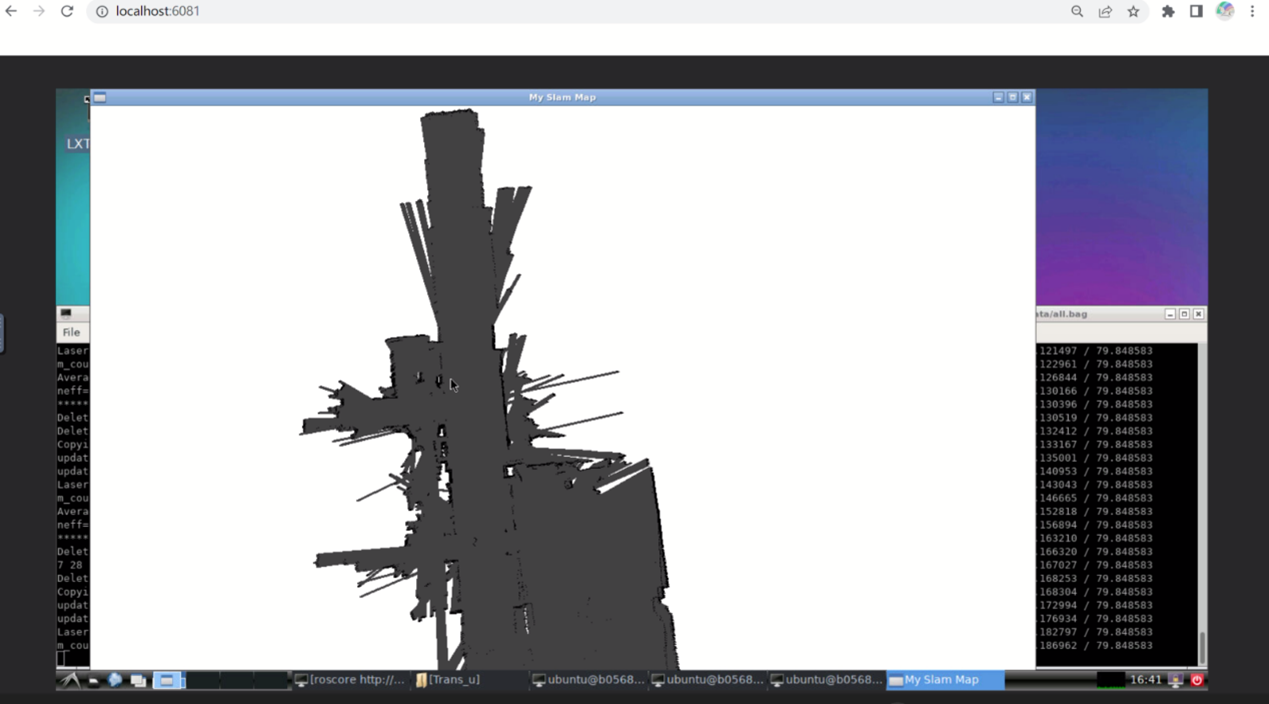
Slam建图显示 在该功能中,使用了第三方开源的Gmapping库,利用该库订阅数据包发布的/scan、/odom话题,接收雷达信息与里程计信息,进行坐标转换,发布/map话题。最后利用OpenCV库绘制出/map话题对应地图数据即可实现Slam建图功能。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 cv::Mat map; void mapCallback (const nav_msgs::OccupancyGrid::ConstPtr& msg) double scale = 1.0 ; int width = 1200 ; int height = 1200 ; cv::Point offset = {-1600 , -1600 }; map = cv::Mat::zeros (cv::Size (width, height), CV_8UC3); for (int i = 0 ; i < msg->info.width * msg->info.height; ++i) { int x = (i % msg->info.width + offset.x) * scale; int y = (i / msg->info.width + offset.y) * scale; if (msg->data[i] == -1 ) { cv::circle (map, cv::Point (x, y), 1 , cv::Scalar (255 , 255 , 255 ), -1 ); } else if (msg->data[i] >= 80 ) { cv::circle (map, cv::Point (x, y), 3 , cv::Scalar (0 , 0 , 0 ), -1 ); } else { cv::circle (map, cv::Point (x, y), 3 , cv::Scalar (64 , 64 , 64 ), -1 ); } } cv::imshow ("My Slam Map" , map); cv::waitKey (1000 ); }
收到/map话题的消息时调用该函数。定义一个cv::Mat类型的变量map,用于存储生成的地图图像。mapCallback函数接收nav_msgs::OccupancyGrid类型的指针作为输入参数。设置地图缩放比例为1.0,宽高默认1200,地图坐标的偏移量默认为{-1600, -1600}。使用cv::Mat::zeros函数创建一个大小为width×height的黑色图像作为地图。使用一个循环遍历msg->data数组中的每个元素,根据元素的值来决定在地图上画圆的位置和颜色:计算当前元素对应的坐标x和y,根据地图的缩放比例和偏移量进行计算。如果元素的值为-1,表示未知区域,使用白色画一个半径为1的圆。如果元素的值大于等于80,表示占据区域,使用黑色画一个半径为3的圆。否则,表示自由区域,使用灰色画一个半径为3的圆。将生成的地图图像显示在名为”My Slam Map”的OpenCV窗口中,并等待1000毫秒。
后记 由衷感谢两位任课老师在软件设计课程中的辛勤奉献!